|
|||||||||||







產(chǎn)品分類 |
||
|
|
||
Tektronix/VM700T Option 11/VM700T(turbo)視頻測量系統(tǒng)
- Tektronix/VM700T Option 11/VM700T(turbo)視頻測量系統(tǒng)
- 欲購買或租賃Tektronix/VM700T Option 11/VM700T(turbo)視頻測量系統(tǒng)?請在線咨詢或拔打24小時電話:13715327187
.bmp) |
詳細資料:
VM700T 選件01/11/30/48
N制和P制
特點與優(yōu)點
- 集多種功能于一身
-
- 數(shù)字波形監(jiān)視器
- 數(shù)字矢量示波器
- 圖象顯示器
- 群時延和頻率響應(yīng)測量
- 噪聲測量
- 自動測量系統(tǒng)
- 自動模式
-
- 演播室、STL、地球站和發(fā)射 臺PAL 電視信號的無人監(jiān)視
- 用戶可自行規(guī)定的測量容限
- -用戶可自行規(guī)定的測量容限 測量模式,可提供被測項目的 圖形顯示
-
- ICPM
- K 因子
- 微分增益和微分相位
- 色度/ 亮度時延
- 噪聲頻譜
- SinX/X 信號的群時延
- 彩條
- 以基準值為參考的多種測量
- 可為測量所有標準測試信號 而設(shè)置
- 獲獎的用戶界面
- 最新式的結(jié)構(gòu)體系
- 極其快速的刷新速率
- 并行和串行打印機端口
- 三通道輸入
- 通道差值模式
- 外接VGA 顯示器端口
- 全文檔遙控操作
- 用于分析和文檔記錄的硬拷貝
PAL 視頻測量
泰克公司以其對電視工業(yè)的杰出貢 獻,榮獲了8 次技術(shù)艾美獎和一次 奧斯卡獎。泰克公司以其在世界電 視工業(yè)領(lǐng)域中的雄厚實力和地位, 使它能夠不斷地設(shè)計推出新的電視 產(chǎn)品并提出最完善的視頻測試方 案。
VM700T 就是這樣的一種產(chǎn)品。它 被公認為事實上的工業(yè)標準并不斷 跟蹤用戶的需求,為基帶視頻信號 和音頻信號的監(jiān)視及測量提供了全 面的解決方案。VM700T 的一些特 點,例如它的非常迅速和全自動的 測量模式以及全手動的操作方式, 這對那些新用戶和熟練的專業(yè)人員 都是非常寶貴的。購置這樣的測量 儀器,無疑是十分值得的。
自動視頻測量系統(tǒng)
VM700T 的自動模式(Auto mode) 可 以迅速而又自動地完成標準視頻傳 輸測量,這些測量包括CCIR Rep. 624-1、Rec.567和Rec.569 等規(guī)定 的項目。無論是場消隱期間或全場 測量均可進行,并能與用戶定義的 測量容限相比較。當測量結(jié)果超出 所規(guī)定的上、下容限時,儀器就會 發(fā)出提示或告警信息。并可按照操 作者預定的時間或者受某一指定事 件的觸發(fā)而自動生成和打印測量報 告。
測量的圖形顯示
儀器的測量模式(Measure mode)可以 自動地用圖形實時地顯示測量結(jié) 果。場消隱期或全場測量的各個項 目,包括噪聲頻譜、群時延、K 因 子、微分增益和微分相位等均能給 出清晰、直觀、易于了解的交互式 數(shù)字顯示。這種顯示具有極快的測 量刷新速率(每秒可高達30 次),這 對于需要就信號的變化作出快速分 析以及提供瞬間及時的調(diào)整是十分有用的。用戶定義的測量容限 值可以直觀地反映在每種圖形顯示 中,并可用于生成測量報告或成為 用戶定義的宏指令。例如,可通過 調(diào)制解調(diào)器撥號報出測量結(jié)果并控 制信號路徑。參考于基準的相對測 試方式,可使信號源歸一化或用來 消除測量過程中的信號通道誤差。 在NVRAM 中可存儲多至兩路的視 頻基準。此外,通過VM700T FTP驅(qū) 動器,可將視頻基準下載到PC 機 而后輸入另一臺VM700T 以供繼續(xù) 使用。運行中的平均值模式可用來 減小噪聲的影響。用戶還可按照自 己的測量要求,編制測量項目和報 告格式。
十分有用的。用戶定義的測量容限 值可以直觀地反映在每種圖形顯示 中,并可用于生成測量報告或成為 用戶定義的宏指令。例如,可通過 調(diào)制解調(diào)器撥號報出測量結(jié)果并控 制信號路徑。參考于基準的相對測 試方式,可使信號源歸一化或用來 消除測量過程中的信號通道誤差。 在NVRAM 中可存儲多至兩路的視 頻基準。此外,通過VM700T FTP驅(qū) 動器,可將視頻基準下載到PC 機 而后輸入另一臺VM700T 以供繼續(xù) 使用。運行中的平均值模式可用來 減小噪聲的影響。用戶還可按照自 己的測量要求,編制測量項目和報 告格式。
Main measure mode display of available 測量項目s.
Measure mode DGDP special position acquisition feature.
數(shù)字波形監(jiān)視器/矢量示波器
VM700T 波形模式提供了視頻信號 的實時圖形顯示,從而實現(xiàn)多種手 動附加測量。使用測量游標可以很 方便地測量視頻信號的時間、頻率 和幅度參數(shù)。這些測量游標能十分 迅速并且精確定位在任何波形過渡 段中的10%、50%和90%的位置上。 游標模式也可用來在屏幕顯示中心 自動地對波形參數(shù)進行計算。計算 出的波形參數(shù)可以是正弦波峰-峰 值幅度、頻率和消隱電平的偏置 量,這對于多波群信號的頻率響應(yīng) 測量是十分有用的。
VM700T 顯示波形上的任意點可向 周圍作垂直方向和水平方向上的擴 展。由于數(shù)據(jù)是數(shù)字化的,因此在 所有的擴展倍率下的波形顯示仍然 清晰明亮并且易于讀出。屏幕顯示 刻度會自動地隨波形而擴展,因而 所有的測量單位都會正確地顯示。 儀器還可提供通道差值模式(A-B、 A-C、B-A、B-C、C-A 和C-B)。屏幕 記憶選擇可啟動包絡(luò)模式,以用于 觀看圖文、抖動或其它依時間而改 變的事件。
In Vector Mode, the VM700T becomes a digital vectorscope with an electronic graticule. The "Color Bar Search" feature makes it easy to quickly display a line containing a color bar test signal.
矢量模式具備通常的波形顯示功 能,顯示的矢量可以旋轉(zhuǎn)或者擴 展,與此同時,所旋轉(zhuǎn)的角度或擴 展的增益數(shù)值均可顯示在屏幕上。
Vertical interval test signals can be seen very clearly for additional analysis of the signal. These can be printed as support documentation for automatic 測量項目 results.
VM700T 特有的“尋找彩條”(Find Color Bars)功能可在所有的視頻信號 中搜索彩條,一旦發(fā)現(xiàn)彩條就可顯 示其矢量。該彩條矢量既可以作為 被選通道色同步的基準,也可以作 為雙通道中任一色同步的基準或連 續(xù)副載波的基準,同時屏幕顯示出 被選通道與基準矢量之間的相位 差。
在波形模式和矢量模式中均可選 行。如果信號合適的話,可以十分 迅速地尋找任何指定行,并對該行 進行顯示或自動測量。
圖象模式
VM700T 利用其圖象顯示可以迅速 地查驗是否為您所要求的信號源。 此外,選擇使用“加亮行”(brigh-tup) 方式可使用戶在屏幕顯示圖象中選 擇任意視頻行,這樣,既可對該行 在測量模式中進行測量,也可對該 行在波形模式或矢量模式中進行觀 測。
Picture mode display. (video courtesy of KOIN-TV, Portland, Oregon.)
Even a single horizontal synchronization pulse can be displayed at a high intensity.
用戶可編程的功能
VM700T的功能模式(Function mode)是 一項特別有用的功能。它可把用戶 的操作程序存儲下來,從而作為用 戶在以后必要時再現(xiàn)測量過程 “( playback”)的宏指令。
例如,用戶建立了一套發(fā)射機的解 調(diào)視頻輸出的測量項目(通過硬拷 貝指令來完成),就能把這一測量 操作過程存儲下來并作以 “DEMOD”標記。此后,用戶可在規(guī) 定的時間內(nèi)通過手動、遙控或完全 自動的方式來再現(xiàn)(playback)這一測 量過程。可以把這個測量運行程序 文件作為文本文件保存下來,并可 使用個人電腦進行編輯、拷貝或傳 送至另一臺VM700T。其它的功能還 有外接串行器件的控制,這些外接 器件包括視頻/ 音頻路由器、切換 器、信號發(fā)生器、電話調(diào)制解調(diào)器 以及支持RS-232 通信的許多其它 器件。
硬拷貝
屏幕上的所有信息, 可通過 Centronics 兼容的并行端口或標準 的RS-232R 接口以高分辨率的圖象 質(zhì)量打印到PostScript®、Hewlett- Packard®、LaserJetTM、DeskJet TM 和 ThinkJetTM 或24 針Epson® 等品牌支 持圖形的打印機上。
利用并行或串行接口也可將自動測 量結(jié)果以文本格式打印到大多數(shù) ASCII 打印機上。
遙控操作
VM700T 具有功能強大的和全文檔 的遙控語言,因此可經(jīng)由RS-232C 接口從遠地終端對VM700T 實行遙 控操作,用來監(jiān)視無人看管的發(fā)射 系統(tǒng)。此外,所有的文件均可送往 一臺主計算機,也可傳送到其它的 VM700T 。VM700T 支持兩種不同的 協(xié)議:FTP(文件傳送協(xié)議)和TELNET (遠程通信網(wǎng)絡(luò))。用戶在處理低波 特率時也可選擇RS-232C 接口的 “無協(xié)議”(no protocol)模式。不過, 傳送文件時只能采用FTP 模式。
技術(shù)規(guī)范
本節(jié)中所列出的性能指標僅在以下 環(huán)境條件下才能滿足:
- 溫度范圍為攝氏0至50度,預熱時 間至少為20分鐘。以下各表格列出 了各個測量項目及其性能指標。 表格中的測量范圍規(guī)定了測量的容 限值。
- 在滿足下述條件時,即標稱 的輸入信號幅度為1 伏峰至峰值 (± 6dB),輸入信號的不加權(quán)信噪 比至少為60dB,且終端負載的精度 為± 0.025%(可采用泰克公司的 PN 011-0102-01 或與此相當?shù)呢?載)。這時所有的測量精度方為有 效,
測量模式*1,2
白條行定時
| 測量項目 | 范圍 | 絕對精度 | R相對精度 |
|---|---|---|---|
| 白條電平(b1 或后肩) | 300 mV to 1.4 V | ±0.5% | ±0.2% |
| 同步電平 | 50 mV to 600 mV | ±0.5% | ±0.2% |
| 同步至白條頂 | 350 mV to 2 V | ±0.5% | ±0.2% |
| 同步/白條幅度比 | 10 to 125% | ±0.5% | ±0.2% |
| 100% 標稱 | |||
| 白條傾斜(Rec569) | 0 to 20% | ±0.2% | ±0.1% |
| 行時間失真(Rec567) | 0 to 20% | ±0.2% | ±0.1% |
| 白條寬度 | 10 μS to 30 μS | ±100 nS | NA |
跳動
| 測量項目 | 范圍 | 測量精度 |
|---|---|---|
| 峰值偏移 | 0 to 50% | ±1% |
| 穩(wěn)定時間 | 0 to 10 s | ±100 ms |
色同步頻率*3
| 測量項目 | 范圍 | R相對精度 |
|---|---|---|
| 色同步頻率誤差 | ±100 Hz | ±0.5 Hz |
色度/亮度
| 測量項目 | 范圍 | 絕對精度 | R相對精度 |
|---|---|---|---|
| 色度/ 亮度時延 | ±300 ns | ±5 ns | ±1.0 ns |
| 色度/亮度增益比 | 0 to 160% | ±1.0% | ±0.1% |
色度噪聲
| 測量項目 | 范圍 | 絕對精度 |
|---|---|---|
| AM 噪聲 | -20 to -80 dB | ±1 dB (-20 to -60 dB) |
| PM 噪聲 | -20 to -70 dB | ±1 dB (-20 to -60 dB) |
色度 非線性*4
| 測量項目 | 范圍 | 絕對精度 | R相對精度 |
|---|---|---|---|
| 色度 幅度 | 0 to 100% | ±0.4% | ±0.2% |
| 色度 相位 | 0 to 360° | ±1° | ±0.2° |
| 色度/亮度互調(diào) | -50 to +50% | ±0.2% | ±0.2% |
*1All accuracies for 測量項目s with averaging capabilities assume the default average of 32.
*2All accuracies for 測量項目s relative to 基準mode assume an average of 256 was used to create the 基準.
*3Requires a 基準signal.
*4Accuracies for 色度 non-linearity 幅度 and相位 測量項目s assume an average of 256.
彩條
| 測量項目 | 范圍 | 絕對精度 | R相對精度 |
|---|---|---|---|
| 亮度電 | 0 to 700 mV | ±3.5 mV | ±0.2% |
| 色度電平 (不含灰色和黑色) | 0 to 700 mV | ±1.0% of 標稱值 | ±0.2% |
| 色度相位 | ±180° | ±0.5° | ±0.1° |
彩條測量
色度 to 亮度
色度 非線性 測量項目.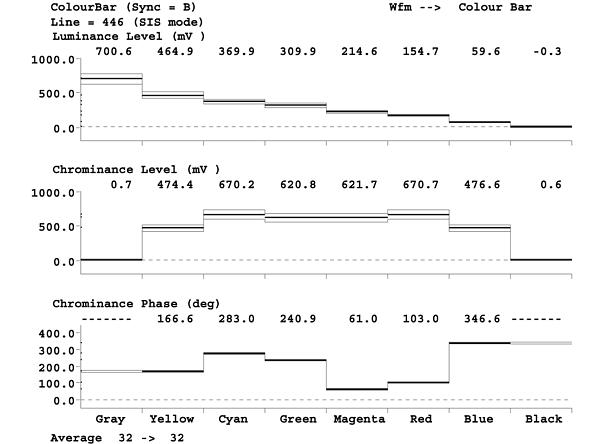
彩條測量項目.
微分增益和相位
| 測量項目 | 范圍 | 絕對精度 | R相對精度 |
|---|---|---|---|
| 微分增益 (最大值, 最小值和峰值) | 0 to 100% | ±0.3% | ±0.03% |
| 微分相位 (最大值, 最小值和峰值) | 0 to 360° | ±0.3° | ±0.03° |
頻率響應(yīng)和群時延
| 測量項目 | 范圍 | 絕對精度 | R相對精度 |
|---|---|---|---|
| 頻率響應(yīng) | ±40 dB | ±1.0 dB | ±0.3 dB to 5 MHz |
| ±40 dB | ±2.0 dB | ±0.6 dB to 6 MHz | |
| 群時延 | ±1.0 μs | ±20 ns | ±5 ns to 5 MHz |
| ±1.0 μs | ±40 ns | ±10 ns to 6 MHz |
微分相位 測量項目.
使用SinX/X 信號對頻率響應(yīng)和群時延進行測量
行消隱
| 測量項目 | 范圍 | 絕對精度 |
|---|---|---|
| 消隱起始 | 0.1 to 4.2 μs | ±50 ns |
| 消隱結(jié)束 | 6.8 to 12.2 μs | ±50 ns |
| 消隱寬度 | 6.9 to 16.4 μs | ±50 ns |
行定時
| 測量項目 | 范圍 | 絕對精度 |
|---|---|---|
| 色同步電平 | 80 to 600 mV | ±1% |
| 行同步上升和下降時間 | 80 ns to 1 μs | ±10 ns |
| 行同步寬度 | 1 to 8 μs | ±10 ns |
| 色同步寬度 | 1.4 to 3 μs | ±25 ns |
| 同步至色同步起始 | 5 to 8 μs | ±25 ns |
| 同步電平 | 75 to 600 mV | ±0.5% |
行定時測量
寄生載波相位調(diào)制
| 測量項目 | 范圍 | 測量精度 |
|---|---|---|
| ICPM(要求有零載波脈沖 以及解調(diào)器C 通道端口上 的正交視頻輸出信號) | 0 to 90° | ±1.0° |
抖動
| 測量項目 | 范圍 | 絕對精度 |
|---|---|---|
| 抖動 (2 Field) | ±20 μs | ±10 ns |
| 長時間抖動 | ±20 μs | ±10 ns |
行抖動測量
K-因子
| 測量項目 | 范圍 | 絕對精度 |
|---|---|---|
| 2T 脈沖K 因子 | 0 to 10% Kf | ±0.3% |
| KPB | -10 to +5% KPB | ±0.3% |
| 脈沖/ 白條比 | 10 to 125% | ±0.7% |
| 脈沖半幅寬(HAD) | 100 to 500 ns | ±5 ns |
K 因子測量
電平表
| 測量項目 | 范圍 | 測量精度 |
|---|---|---|
| 電平表 | 0 to 1.4 V | ±3.5 mV |
電平表測量項目.
行頻測量
| 測量項目 | 范圍 | 測量精度 |
|---|---|---|
| 行頻測量 | ±3% | ±0.1% |
| 場頻 | ±3% | ±0.1% |
亮度 非線性 測量項目.
亮度 非線性
| 測量項目 | 范圍 | 絕對精度 | R相對精度 |
|---|---|---|---|
| 亮度 非線性 | 0 to 100% | ±0.4% | ±0.2% |
多波群測量項目.
多波群
| 測量項目 | 范圍 | 絕對精度 | R相對精度 |
|---|---|---|---|
| 多波群標志幅度 | 0 to 700 mV | ±0.5% | NA |
| 波束 1-5 (0.5, 1.0, 2.0, 4.0, 4.8 MHz) | -40 to +6 dB | ±0.1 dB | ±0.03 dB |
| 波束 6 (5.8 MHz) | -40 to +6 dB | ±0.2 dB | ±0.06 dB |
噪聲頻譜
| 測量項目 | 范圍 | 絕對精度 |
|---|---|---|
| 不加權(quán)信噪比(5MHz 低通) | -20 to -80 dB |
±0.4 dB (5 MHz Low Pass) (-20 to -60 dB) |
|
±1.0 dB (-60 to -70 dB) | ||
| 亮度加權(quán)信噪比 | -20 to -80 dB |
±1.0 dB (5 MHz Low Pass and Signal-to-噪聲) (-20 to -60 dB) Unified Weighting) |
|
±2.0 dB (-60 to -70 dB) | ||
| 色度加權(quán)信噪比 | -20 to -80 dB |
±1.0 dB Signal-to-噪聲 (-20 to -60 dB) |
|
±2.0 dB (-60 to -70 dB) |
噪聲頻譜 測量項目.
| 測量項目 | 范圍 | 絕對精度 |
|---|---|---|
| SCH相位 | ±90° | ±5° |
| 同步定時 | ±1 μS | ±10 nS |
| 色同步定時 | ±180° | ±5° |
SCH相位 測量項目.
場消隱
| 測量項目 | 范圍 | 絕對精度 |
|---|---|---|
| 均衡脈沖寬度 | 80 ns to 1 μs | ±10 ns Width |
| 80 ns to 1 μs | ±10 ns | |
| 寬脈沖寬度 | 80 ns to 1 μs | ±10 ns |
| 場消隱 | 19 to 30 lines | NA 第一場 |
| 19 to 30 lines | NA | |
| 場消隱 | 19 to 30 lines | NA 第二場 |
| 19 to 30 lines | NA |
場消隱測量
場消隱缺口脈沖測量
自動模式
行消隱定時測量
這里的測量項目均是從有效信號區(qū)域中所采集的樣值上進行 的。除了行同步上升時間和下降時間之外,其它項目的測量均 按照CCIR 報告書624-1 來進行。
| 測量項目 | 范圍 | 測量精度 |
|---|---|---|
| 色同步持續(xù)時間 | 6 to 13 cycles (10 cycles 標稱值) | ±0.1 cycle |
| 前肩寬度 | 0.5 to 3 μs (1.5 μs 標稱值) | ±20 ns |
| 行消隱 | 9 to 16 μs (12 μs 標稱值) | ±50 ns |
| 行同步上升和下降時間 | 120 to 300 ns | ±15 ns |
| 300 ns to 1 μs | ±30 ns | |
| 行同步寬度 | 1.4 to 6.6 μs (4.7 μs 標稱值) | ±10 ns |
| 行同步至色同步起點間隔 | 2.2 to 8 μs (5.6 μs 標稱值) | ±20 ns |
| 色同步寬度 | 1.4 to 3 μs | ±25 ns |
| SCH相位 | ±90° | ±5° |
場消隱定時測量
| 測量項目 | 范圍 | 測量精度 |
|---|---|---|
| 均衡脈沖寬度 | 1.4 to 20 μs (2.35 μs 標稱值) | ±10 ns |
| 寬脈沖間距 | 1.4 to 20 μs (4.7 μs 標稱值) | ±10 ns |
Other Timing 測量項目s
| 測量項目 測量標準 | 范圍 | 測量精度 | ITS Element |
|---|---|---|---|
| Bar Rise Time | 120 to 300 ns | ±20 ns | B2 Measured from 10% to 90% |
| 0.3 to 1.0 μs | ±30 ns |
其它定時測量
| 測量項目 | 范圍 | 測量精度 | ITS Element | 測量標準 |
|---|---|---|---|---|
| 平均圖象電平 | 0 to 200% | ±3% | ||
| 同步幅度誤差 | +100 to -50% (300 mV 標稱值) | ±0.5% of 標稱值 | Live picture area | CCIR Rec. 569 |
| 同步幅度誤差 (含同步傳聲) | +100 to -50% (300 mV 標稱值) | ±0.3% of 標稱值 | Last broad pulse in field | CCIR Rec. 569 |
| 色同步幅度誤差 | +80 to -50% (300 mV 標稱值) | ±1.0% | Live picture area | CCIR Rec. 569 |
| 色度 基準幅度誤差 | -80 to +50% (300 mV 標稱值) | ±1.0% | D2 | CCIR Rec. 569 |
| 亮度條幅度誤差 | +30 to -70%(700 mV 標稱值) | ±0.3% | B2 | CCIR Rec. 569 |
| 亮度條幅度 | 200 to 900 mV | ±2.2 mV | B2 | |
| 亮度條幅度 (載波的百分比) | 0 to 90% of 最大值載波 | ±0.3% | B2 and 零 載波 | |
| 殘留載波 (白條頂端) | 0 to 90% of 最大值載波 | ±0.3% | B2 and 零 載波 | |
| 消隱電平 | 0 to 90% of 零 載波 | ±0.2% | Live picture area | CCIR Rep. 624-1 |
| 色度-亮度 增益不等 | ±75% of bar 幅度 | ±1.0% | G1 or G2 | CCIR Rec. 569 |
| 色度-亮度 時延不等 | ±300 ns (0 ns 標稱值) | ±5 ns | F or G1 or G2 | CCIR Rec. 569 |
| 同步/白條比(3/7) | 20 to 110% | ±0.5% | B2 | CCIR Rec. 569 |
| 同步至白條頂0 | 0.5 to 2 V | ±0.5% | B2 | CCIR Rec. 569 |
| C/L 增益誤差 ±50% (使用調(diào)制脈沖) | ±1% | F | ||
| 同步幅度 | 75 to 600 mV | ±1.5 mV | ||
| 色同步幅度 | 75 to 600 mV | ±3 mV | ||
| 色同步幅度差 | ±2% | |||
| 色同步正交誤差 | ±1° | |||
| 微分增益 (峰值 andp-p) | 0 to +100% (0% 標稱值) | ±0.3% | D2 | CCIR Rec. 569 |
| 微分相位 (峰值 andp-p) | 0 to 360° (0° 標稱值) | ±0.3° | D2 | CCIR Rec. 569 |
頻率響應(yīng)測量
| 測量項目 | 范圍 | 測量精度 | 插入測試信號 | 測量標準 |
|---|---|---|---|---|
| 多波群標志幅度 | 20 to 130% of bar (60% 標稱值) | ±0.5% | C1 | CCIR Rec. 567 |
| 多波群幅度 | 0 to 200% of flag | ±1.5% of flag (±2.5% of 5.8 MHz packet) | C2 | CCIR Rec. 567 |
波形失真測量
| 測量項目 | 范圍 | 測量精度 | ITS Element | 測量標準 |
|---|---|---|---|---|
| 基線失真 | 50% of bar | ±0.3% | B1 | CCIR Rec. 569 |
| 2T 脈沖/白條比誤差 | +25 to -90% (0% 標稱值) | ±0.5% | B1 | CCIR Rec. 569 |
| 2T 脈沖 K 因子 | 0 to 10% Kf (0% Kf 標稱值) | ±0.3% Kf | B1 | CCIR Rec. 569 |
| 白條傾斜 (端點) | 0 to 40% (0% 標稱值) | 0.20% | B2 | CCIR Rec. 567 |
| 白條傾斜 (峰值-to-峰值) | 0 to +40% (0% 標稱值) | ±0.2% | B2 | CCIR Rec. 567 |
| 行時間失真 | 0 to 40% of bar | ±0.2% | B2 | CCIR Rec. 560 |
| 白條傾斜 (Rec 569) | 0 to 40% of bar | ±0.2% | B2 | CCIR Rec. 569 |
| 場時間失真 | 0 to 35% | ±0.5% | Field Square Wave | |
| 色度-亮度互調(diào) | ±50% (0% 標稱值) | ±0.2% | G1 or G2 | CCIR Rec. 569 |
| 亮度非線性 | 0 to 50% (0% 標稱值) | ±0.4% | D1 | CCIR Rec. 569 |
低頻誤差
| 測量項目 | 范圍 | 測量精度 | 測量標準 |
|---|---|---|---|
| 低頻率誤差 (Reported as: CCIR LF誤差 50-550 Hz LF誤差 10-1000 Hz LF誤差) | 0% to 25% (0% 標稱值) | ±0.8% | CCIR Rec. 569 |
噪聲測量
| 測量項目 | 范圍 | 測量精度 | 測量標準 |
|---|---|---|---|
| 不加權(quán)SNR(567) | 26 to 60 dB | ±1.0 dB | 在靜噪行上測量 |
| 61 to 70 dB | ±2.0 dB | 按照CCIR Rec. 567 | |
| 亮度加權(quán)SNR | 26 to 60 dB | ±1.0 dB | 在靜噪行上測量 |
| 61 to 70 dB | ±2.0 dB | 按照CCIR Rec. 567 | |
| 色度加權(quán)SNR | 26 to 60 dB | ±1.0 dB | 在靜噪行上測量 |
| 61 to 70 dB | ±2.0 dB | 按照CCIR Rep. 637-2 | |
| 周期性SNR | 26 to 60 dB | ±1.0 dB | 在靜噪行上測量 |
| 61 to 70 dB | ±2.0 dB | 按照CCIR Rep. 637-2 | |
| 不加權(quán)SNR | 26 to 60 dB | ±1.0 dB | 在靜噪行上測量 |
| 61 to 70 dB | ±2.0 dB | 按照CCIR Rec. 569 | |
| 亮度加權(quán)SNR | 26 to 60 dB | ±1.0 dB | 在靜噪行上測量 |
| 61 to 70 dB | ±2.0 dB | 按照CCIR Rec. 569 |
寄生載波相位調(diào)制
| 測量項目 | 范圍 | 測量精度 |
|---|---|---|
| ICPM(需要零載波脈沖和解調(diào)器C 通道上的正交視頻輸出) | 0 to 30° | ±1.0° |
CCIR 建議書567 的統(tǒng)一不加權(quán)濾波器響應(yīng)曲線
CCIR 建議書567 的統(tǒng)一亮度加權(quán)濾波器響應(yīng)曲線
CCIR 報告書637-2 的色度加權(quán)濾波器響應(yīng)曲線
VM700T 以易讀的格式顯示出測量結(jié)果,標出了測量時間、測量用信號源、測量項目,并給出了該測量值是否超出了提示(*)或告警(**)容限。
行消隱定時波形測量
場消隱定時波形測量
Elements B1 and B2 (CCIR recommendation 567).
測量方法
以下內(nèi)容給出了VM700T 選件11 的 測量方法。必要時可參考有關(guān)的 CCIR 建議書。
行消隱定時測量
- 色同步持續(xù)時間:測量時應(yīng)在色同 步信號的色度包絡(luò)的半幅度點之間 進行,測量結(jié)果表示為半幅度點之 間的副載波周期數(shù)。參見行消隱定 時波形測量波形圖中的“h”部分及 CCIR 報告書624-1。
- 前肩寬度:測量應(yīng)從白峰電平和消 隱電平間的半幅度點開始,止于同 步頭前沿的半幅度點,兩個半幅度 點之間的時間間隔即為前肩寬度, 參見行消隱定時波形測量圖的“C” 部分和CCIR 報告書624-1。
- 行消隱期:測量應(yīng)從白峰電平和消 隱電平間的半幅度點開始,止于后 肩處消隱電平和峰值白電平間的半 幅度點,兩個半幅度點之間的時間 間隔即為行消隱期,參見行消隱定 時波形測量圖的“a”部分和CCIR報 告書624-1。
- 行同步上升時間和下降時間(脈沖 建立時間):行同步脈沖前沿的10% 幅度點至90%幅度點之間的時間寬 度為行同步上升時間,后沿的10% 幅度點至90%幅度點之間的時間寬 度為行同步下降時間。
- 行同步寬度:行同步信號的前、后沿 半幅度點之間的時間間隔為行同步 寬度。參見行消隱定時波形測量圖 的“d”部分和CCIR 報告書624-1。
- 行同步至色同步起點的時間寬度:測量時應(yīng)從行同步的前沿半幅度點 始,止于色同步信號的色度包絡(luò)前 沿的半幅度點,參見行消隱定時波 形測量圖的“g”部分和CCIR 報告 書624-1。
場消隱定時測量
- 均衡脈沖寬度:
- 測量均衡脈沖前、 后沿半幅度點之間的時間間隔。參 見場消隱定時波形圖的“p”部分和 CCIR 報告書624-1 及圖2-1(a),(b), (c)。
- 寬脈沖期:測量寬脈沖前、后沿半 幅度點之間的時間間隔。參見場消 隱定時波形圖的“q”部分和CCIR報 告書624-1 及圖2-1(a),(b),(c)。
其它定時測量
- 白條上升時間:測量白條前沿10% 幅度點和90%幅度點之間的時間間 隔。參見圖中的B2 單元。
幅度和相位測量
- 同步幅度誤差:測量所采集的同步 脈沖樣值與標稱300mV之間的幅度 差,并將測量結(jié)果以標稱300mV的 百分比來表示。如果該同步脈沖樣 值幅度大于300mV,其符號為正值。
- 色同步幅度誤差:測量所采集的色 同步脈沖樣值中心的峰-峰幅度與 標稱300mV之間的幅度差,并將測 量結(jié)果以標稱300mV幅度的百分比 來表示。如果該色同步脈沖樣值的 峰-峰幅度大于300mV,其符號為 正值。
- 色度基準幅度誤差:在消隱電平上 所采集的色度信號的峰-峰幅度與 標準幅度數(shù)值(規(guī)定為白條幅度的 0.4倍)的差值即為色度基準幅度誤 差,以其占標準值的百分比來表示 測量結(jié)果。如果所采集的色度信號 峰-峰幅度超出280mV,則符號為 正。參見D2單元和CCIR建議書569。
- 亮度條幅度誤差:所采集的亮度條 幅度與標準700mV的偏差值即為亮 度條幅度誤差。當采集的亮度條幅 度超出700mV 時,符號為正。參見 B2 單元和CCIR 建議書569。
- 亮度條幅度:測量所采集的亮度白 條幅度的絕對值,測量結(jié)果以mV或 載波的百分比(如果載波存在)來 表示。參見B2 單元。
- 條傾斜誤差:測量采樣白條頂端與 白條中心幅度的最大偏差,不計入 白條前沿半幅度點后1 微秒與白條 后沿半幅度點前1 微秒的超出部 分。差值的符號總為正值。測量結(jié) 果以采樣白條幅度的百分比來表 示。參見B2單元和CCIR建議書567。
- 消隱電平:在32個采樣行中,對每 行后肩中心附近的16 個樣值電平 進行測量,取平均值作為消隱電平 的測量值。測量結(jié)果以載波的百分 比來表示。如果場消隱期內(nèi)沒有載 波,則不測量。
- 2T脈沖K因子:在2T脈沖前沿半幅 度點前1微秒內(nèi)或者2T脈沖后沿半 幅度點后1 微秒內(nèi)出現(xiàn)的正向或負 向反射半波(回波)中,測出其中的 最大加權(quán)幅度,測量結(jié)果以K 因子 表示,它是回波的加權(quán)幅度與2T脈 沖采樣幅度的比值。加權(quán)是基于 CCIR 建議書567 中圖29a 所給出的 刻度。參見B1 單元。
- C/L增益不等:測量G1或G2單元中 的色度信號的峰-峰幅度(標稱值 為700mV)樣值與亮度條幅度(標 稱值也為700mV)樣值間的差值,測 量結(jié)果以采樣白條幅度的百分比來 表示。當色度信號的峰-峰幅度大 于亮度白條幅度時,測量結(jié)果為正 值。參見G1或G2單元和CCIR 建議 書569。
- C/L 時延不等:測量10T 或20T 復合 脈沖信號中的色度分量中心與復合 脈沖信號中的亮度分量中心間的時 間差,測量結(jié)果以納秒表示。當色 度分量滯后于亮度分量時,其符號 為正值。參見F 單元和CCIR 建議書 569。
- C/L 互調(diào):在電平為350mV 的臺階 上,其中有一部分疊加有色度信 號,而另一部分則沒有色度信號。 將疊加有色度信號的臺階中濾除色 度信號之后,其臺階電平與沒有疊 加色度信號的臺階電平之差值,作 為C / L 互調(diào)測量值,其結(jié)果以白 條幅度樣值的百分比來表示。如果 濾除色度信號后的臺階電平大于無 色度信號疊加的臺階電平值,則測 量結(jié)果為正值。參見G1 或G2 單元 和CCIR 建議書569。
- 微分增益:以峰-峰微分增益作為 測量結(jié)果。從5 級臺階中找出最大 峰-峰幅度的色度信號,求出它與 消隱電平處色度信號峰-峰幅度的 比值,并由單位1減去這個比值;同 樣地,找出最小峰-峰幅度的色度 信號,求出它與消隱電平處色度信 號峰-峰幅度的比值,也由單位1 減去這個比值。而最后的測量結(jié)果 是上述兩個差值(的絕對值)之和。 參見D2 單元和CCIR 建議書569。
- 微分相位:以峰-峰微分相位作為 測量結(jié)果。測出5 級臺階中的色度 信號與消隱電平處色度信號的最大 相位差(絕對值);同樣地,測出5 級臺階中的色度信號與消隱電平處 色度信號的最小相位差(絕對值), 最后的測量結(jié)果是兩個相位差之 和,并以度表示。參見D2 單元和 CCIR 建議書569。
- 亮度非線性失真:在由5 級臺階形 成的6 個亮度電平中,每相鄰的兩 個亮度電平進行比較,以相鄰臺階 電平的最大偏差的百分比作為測量 結(jié)果。其符號總為正值。參見D1單 元和CCIR 建議書569。
F、G1 和G2 單元(CCIR 建議書567)
D1 和D2 單元(CCIR 建議書569)
頻率響應(yīng)測量
- 多波群標志幅度:測量多波群標志 頂端中心點至該標志的后續(xù)底部間 的幅度,并以采樣的白條幅度的百 分比來作為測量結(jié)果。參見C1單元 和CCIR 建議書567。
- 多波群幅度(5 個波束):在前5 個 多波群波束中,測量每個波束的峰 -峰幅度。其中前兩個波束的峰- 峰幅度測量值是在該波束中心的4. 5(s窗口中進行的,后面的三個波束 是在該波束中心的1.3(s 窗口中進 行的,最后一個波束不予測量。最 后的測量結(jié)果以采樣的標志幅度的 百分比來表示。參見C1 和C2 以及 CCIR 建議書567。
線性波形失真測量
- 底線失真:測量白條后沿半幅度點 之后400 納秒處的信號電平與消隱 基準處信號電平的差值,信號帶寬 應(yīng)限制在3.3MHz,最后的測量結(jié)果 以采樣白條幅度的百分比來表示。 如果白條附近的電平高于消隱基準 處信號電平,則測量結(jié)果為正值。 參見CCIR建議書569(2.4段)和圖1。
- 2T 脈沖/ 白條比誤差:測量2T 脈沖 的采樣幅度與采樣白條幅度之間的 差值。如果2T脈沖幅度較大,則符 號為正。最后的測量結(jié)果以采樣白 條幅度的百分比來表示。參見B1和 B2 單元以及建議書569。
Elements C1 and C2 (CCIR Recommendation 569).
低頻誤差
- 低頻誤差: 測量消隱電平處所采集 的最大波動的峰-峰幅度,頻率帶 寬應(yīng)在10Hz 與2KHz 之間。以白條 樣值的百分比來表示。
訂購信息
VM700T Opt. 11
PAL 視頻測 量系統(tǒng)
包括附件: 儀器使用說明、3 個75W 終端負載(011-0102-00),電源線。
訂購時,請使用這里給出的術(shù)語。裝運時它是作為機架安裝產(chǎn)品的標準儀器。
選件01 - NTSC 測量。
選件01/11 -雙制式(NTSC/PAL)測量。
選件20 -圖文電視測量。
選件21 -攝像機測量。
選件30 -分量測量。
選件40 -音頻測量模塊。
選件41 - 6 通道音頻測量模塊。
選件42 -音頻/ 視頻時延測量。
選件48 - GPIB 接口。
選件1C -箱體型。
選件1G -回送/ 循環(huán)測量。
選件1P -打印機。
選件1T - NIST/MIL 跟蹤校正。
選件1Z -探頭適配器(067-1429-00)。
選件3Z - 3 個探頭適配器(每個均為067-1429-00)。
VM700T 軟件工具
VMBKUP - VM700T 備份工具軟件。
VMREMGR - VM700T 的遙控圖形軟件。
VMT - VM700T 的遙控軟件。
選購附件
VM7FC1 -機架單元轉(zhuǎn)換為機箱型的現(xiàn)場安裝配件。
VM7FR1 -機箱型轉(zhuǎn)換為機架單元的現(xiàn)場安裝配件。
儀器保證:
我們的大多數(shù)設(shè)備在裝運之前均經(jīng)過嚴格的質(zhì)量檢測與校驗。也可申請國家計量證書。
品牌推薦 |
||
|
|
||
|
Copyright© 2022 All Rights Reserved. 深圳市嘉惠捷科技有限公司 版權(quán)所有 [粵ICP備11090750號] [法律顧問] 公司地址:深圳市南山區(qū)西麗牛成路221號8樓 郵編:518000 在線QQ服務(wù): 回收熱線:13982098642 E-mail:sales@test-e.com |
